







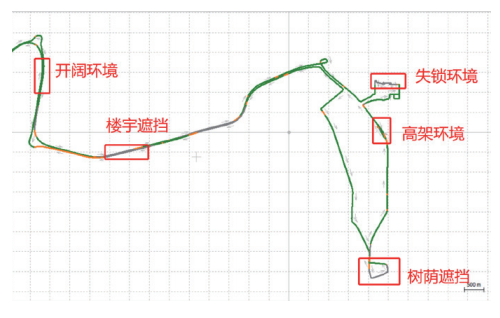
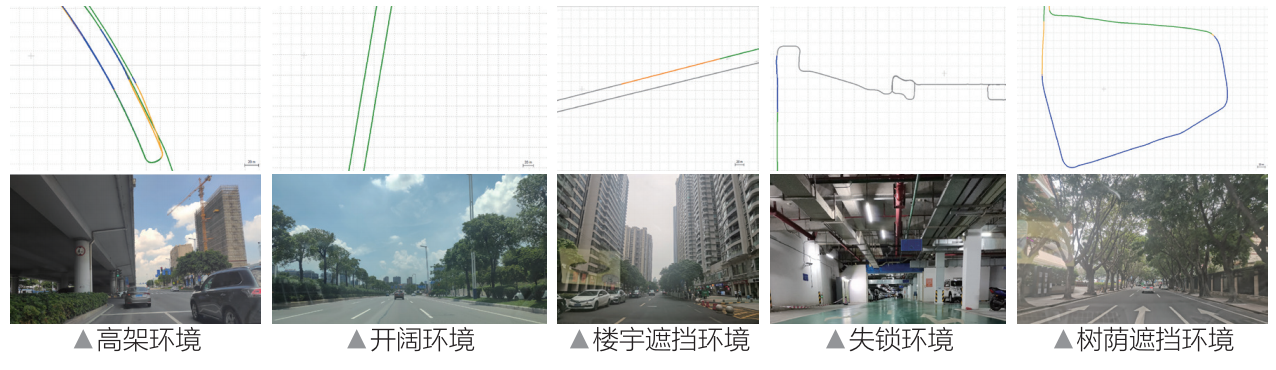
當(dāng)前智能化移動(dòng)設(shè)備對(duì)高精度、高可靠定位已成剛需,傳統(tǒng)移動(dòng)設(shè)備定位主要依靠普通的GNSS定位技術(shù),這種技術(shù)易受外界環(huán)境影響,導(dǎo)致定位偏差甚至丟失;GNSS/INS的組合方式可以有效改善上述問題,多源數(shù)據(jù)融合的方案更是成為無人駕駛可靠定位的首要選擇。
技術(shù)背景:GNSS/INS 緊耦合定位定向技術(shù),車輛實(shí)現(xiàn)全場(chǎng)景精準(zhǔn)定位。
技術(shù)應(yīng)用:
1.高頻率實(shí)時(shí)輸出緊耦合位置、速度、姿態(tài)數(shù)據(jù);
2.循環(huán)保存移動(dòng)端衛(wèi)慣原始數(shù)據(jù)(內(nèi)置8G存儲(chǔ)),支持定位后處理;
3.與其他傳感器實(shí)現(xiàn)數(shù)據(jù)同步(PPS、GPRMC等);
4.數(shù)據(jù)回傳服務(wù)器,支持后臺(tái)監(jiān)控。
安裝調(diào)試流程
1.車端安裝天線和組合導(dǎo)航模塊,保持差分供給正常,供電正常;
2.量取主從天線桿臂參數(shù)并對(duì)模塊相關(guān)參數(shù)進(jìn)行配置;
3.一定環(huán)境下進(jìn)行跑車標(biāo)定,確保參數(shù)標(biāo)定正常;
4.導(dǎo)航定位,輸出定位結(jié)果并解析。
注:確保天線和模塊正確安裝且相對(duì)位置不變的條件下,模塊只需標(biāo)定一次。
優(yōu)勢(shì)體現(xiàn):
1.體積小、精度高、定位定向可靠;
2.支持BDS、GPS、GLONASS、GALILEO雙頻定位定向;
3.緊耦合/松耦合算法;
4.支持融合輪速檔位信息、攝像頭數(shù)據(jù)、高精地圖數(shù)據(jù);
5.車規(guī)級(jí)設(shè)計(jì);
6.豐富的外部接口:以太網(wǎng)、USB、串口、can 口。






 頂部
頂部