該方案采用了“空天地一體”監測技術,水上采用無人機搭載PM-1500機載激光測量系統,水下采用iBoat BS12水文測驗無人船,進行水下水下一體化測量,
可快速獲取水上水下一體化地形數據,真實反映現實場景地形地貌情況,成果多樣化,可滿足當前多源數據融合需求,可廣泛應用于水利、交通、地質等測繪任務。
方案主要設備:


方案作業過程:
1. 前期進行項目調研與需求分析
對測量區域進行詳細的調研,了解水域的地理特征、測量范圍、水下地貌等信息;明確測量目標,并根據項目具體需求,明確測量精度、范圍等。

1. 測量實施
1)在項目現場進行踏勘,確定測量路線等;將PM-1500機載激光測量系統安裝到無人機上,并進行設備調試。
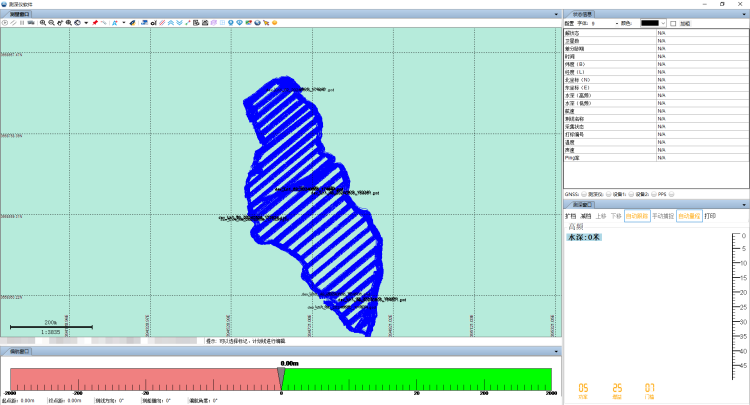
2)按照預定的測量路徑和參數設置,啟動測量設備進行數據采集,并密切關注設備的運行狀態和數據質量。在數據采集完成后,對數據進行質量檢查。
2. 數據處理與分析
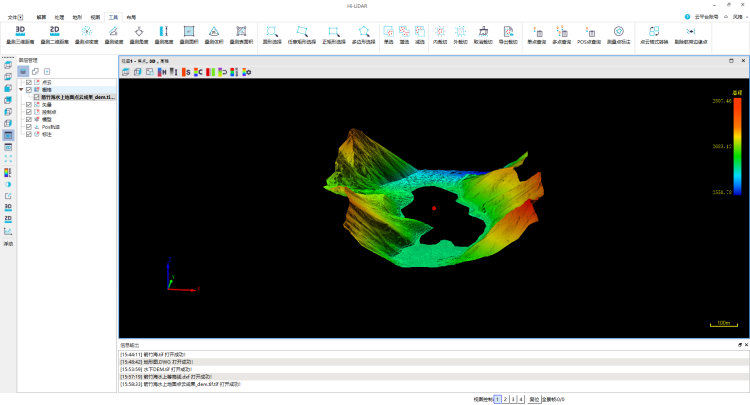
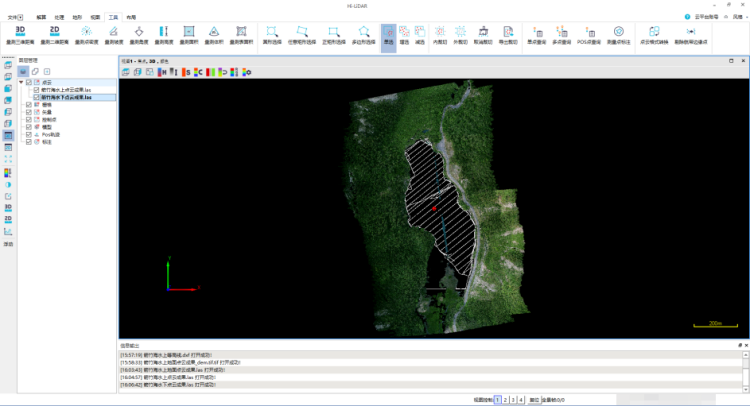
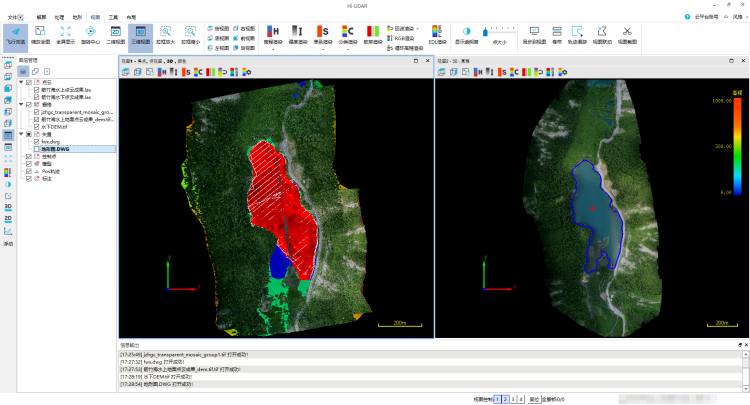
1)配套Hi-LiDAR點云處理軟件,將PM-1500機載激光測量系統采集的激光點云基礎數據,通過后處理得到地面點后輸出測區水上高程模型(DEM)。
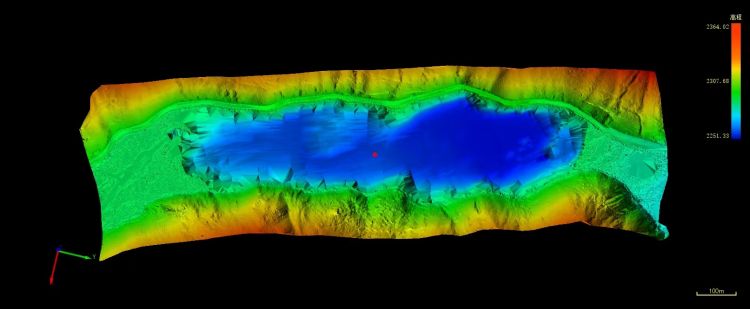
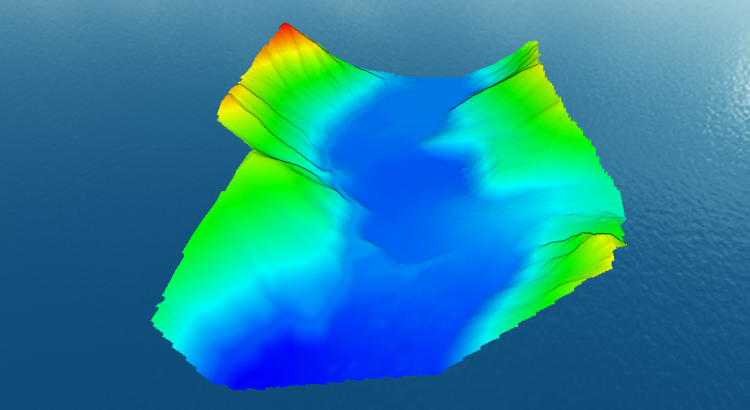
2)使用iBoat BS12水文測驗無人船采集水下地形基礎數據,通過HiMAX后處理軟件輸出水下地形高程模型(DEM)。
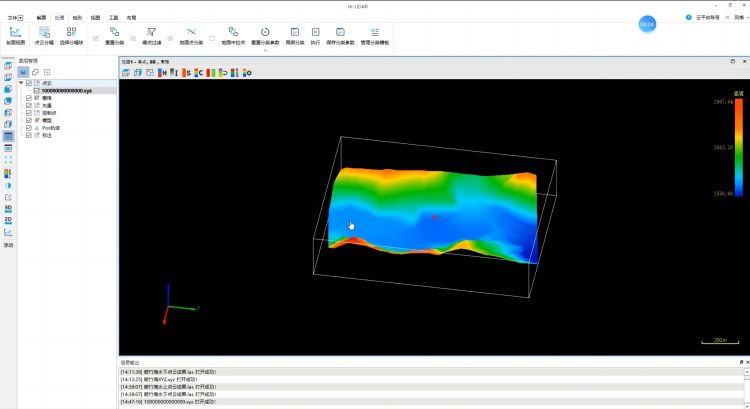
3)利用Hi-LiDAR多源數據可視化管理工具,對成果數據進行融合、疊加,從水上水下整體視角、多源數據疊加分析。























 頂部
頂部